
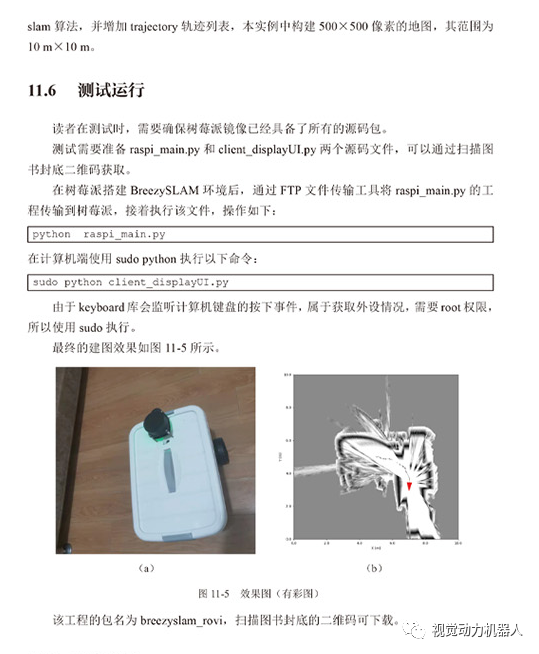
再也不是“犹抱琵琶半遮面”了,而是“长风万里送友人”。
《轮式自主移动机器人编程实战》一书经过一段时间的打磨终于在京东上市了,先睹为快。它长这样。

那么这本书是干嘛的呢?
如果你想 DIY 一款轮式自主移动机器人,又不知道如何实现,本书可能会帮到你。
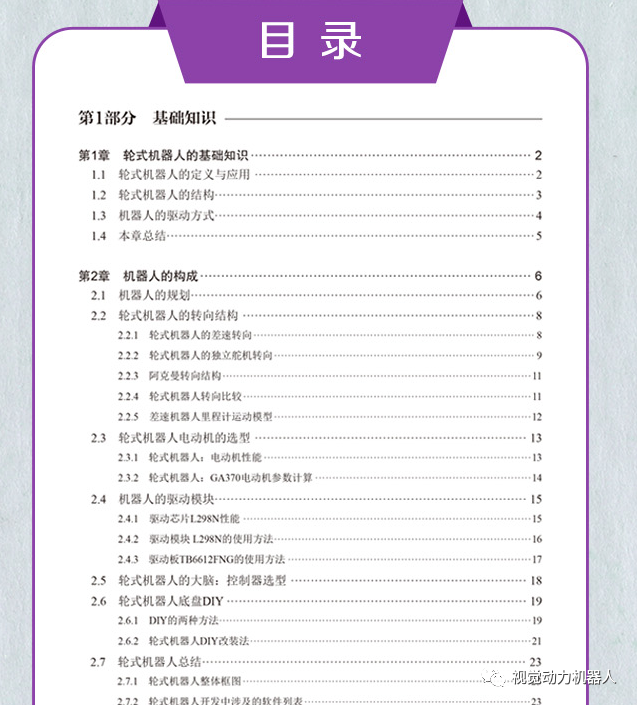
本书系统讲解轮式自主移动机器人如何从 0 到 1 实现自主运动。以树莓派和 STM32 单片机为例,详细介绍轮式机器人的硬件结构,包括驱动控制器的搭建、中央处理器的选型开发、滤波算法、平面地图构建算法、规划算法、导航算法、室外 GPS 定位实战案例(异地远程控制和地图路径规划等)、室内 BreezySLAM 建图案例、 ROS 开发案例等,以及自主移动机器人和无人车驾驶的基本实现原理,都能在本书中找到答案。本书还提供开放的云平台路径规划,可在农田、工业园区巡检、物流送货等场景测试。
本书可作为高等院校物联网、机器人、计算机、通信、电气及自动化等专业的教材,也可作为计算机、电子及智能车设计竞赛的自学或培训教材,还可供各类电子工程、自动化技术人员和计算机爱好者学习参考。
本书有哪些特色呢?
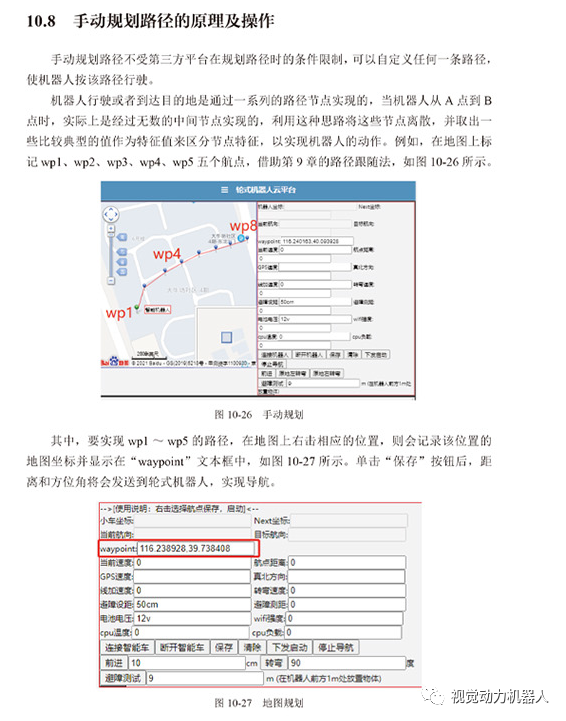
本书中有众多新颖的内容是你在其他书本中无法找到的,例如地图定位的简易快速实现、手动规划路径、避障算法的快速测试、远程遥控趣味玩法、SLAM快速建图等。
另外本书提供了以学习为目的的免费云服务,以便更好地实现路径规划和定位展示、远程操作等趣味玩法。
将重要的试验源码打包整理,并配有试验结果和数据作为参考。读者仅需下载后Make编译 就能“飞一般“的跑出效果来。
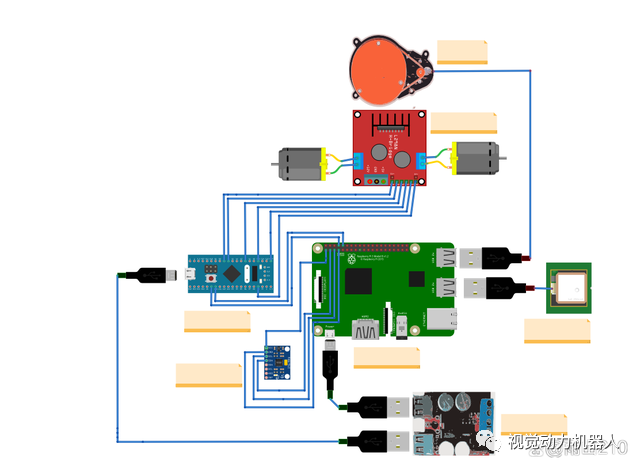
源码工程包含30多套,包含STM32的双路电机驱动开发、9轴陀螺仪开发、激光雷达开发、画轨迹、dwa避障算法、A*路径规划算法、栅格地图贝叶斯二值化等。工程的源码大部分使用C/C++ 开发实现,C++是一种面向对象的编程语言,C++ 在 C 语言的基础上增加了面向对象编程。其特点是兼容性强,方便移植开发。
本书不仅提供了源码还配套了视频讲解,方便读者快速入门和理解。
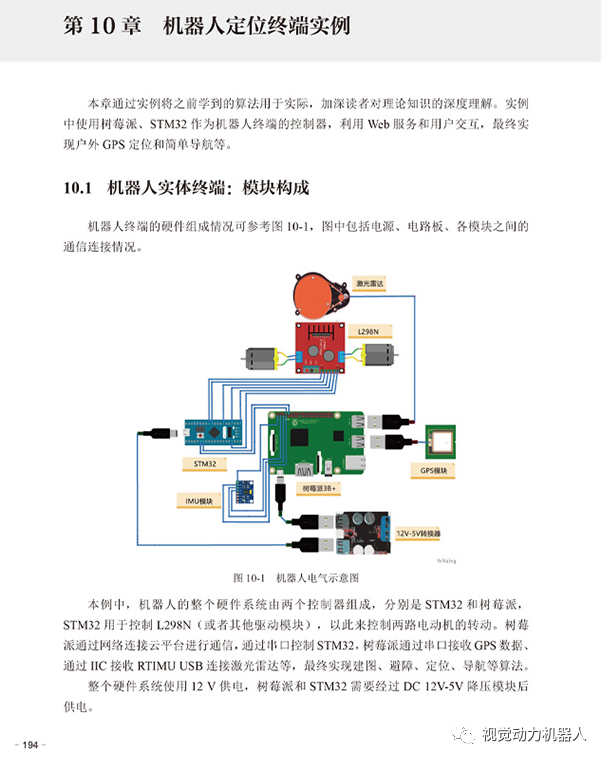
轮式自主移动机器人具备自主和智能的特点,如何快速搭建机器人系统,则需要一个完整的教程指导。轮式自主移动机器人主要分为软件和硬件。硬件可以分成驱动底盘和Linux控制器。
本章的目录呢?
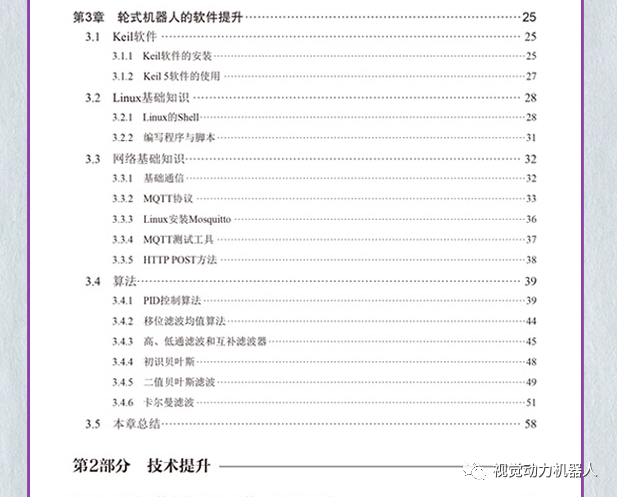
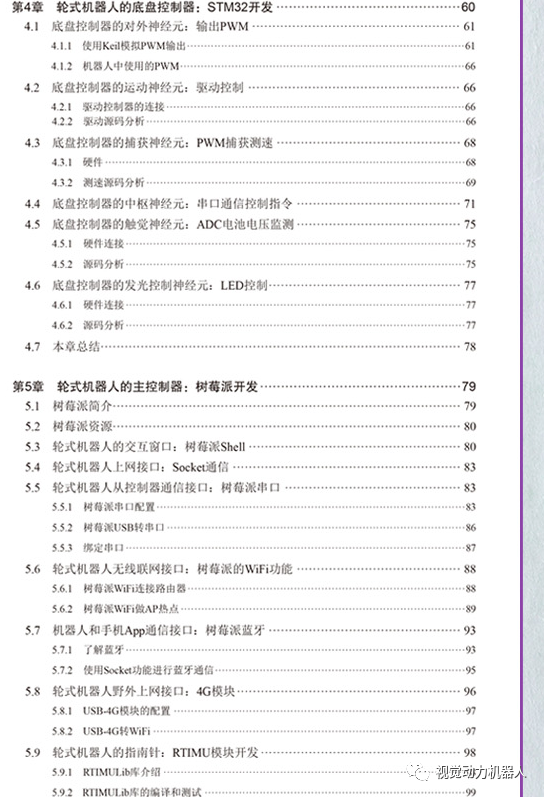
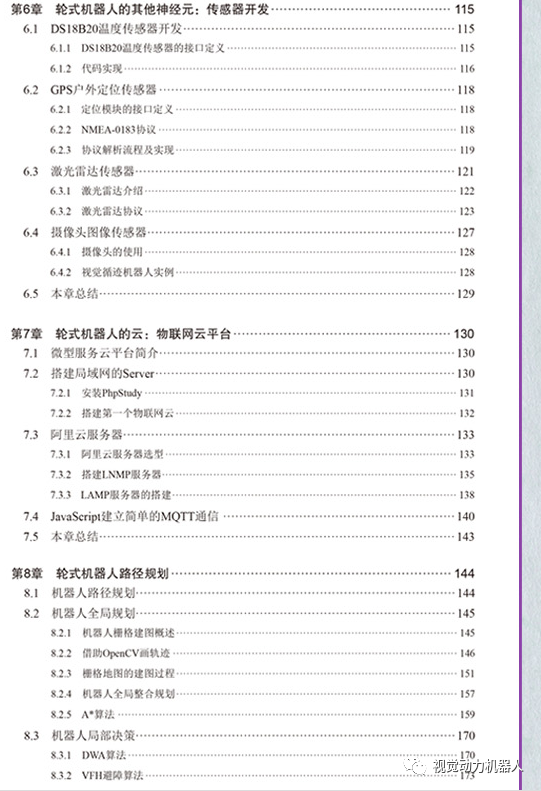
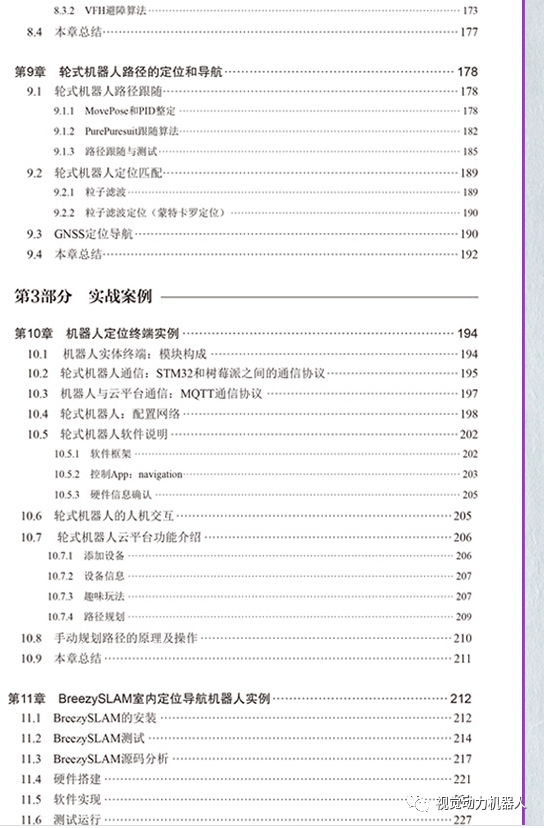
 看看精彩章节吧。
看看精彩章节吧。
活动说明
截止到本周五,转发后点赞次数最多的前三名将有机会获得免费图书一套。包邮哦!赶快行动吧。
注意:请后台截图给笔者。
另外本书已在淘宝和京东出售,请认准正版购买。
本篇文章来源于微信公众号: 视觉动力机器人
原创文章,作者:贾明华,如若转载,请注明出处:http://www.aihpm.com/?p=1075